Welcome to teachingPlugin (2019.08.20)
はじめに
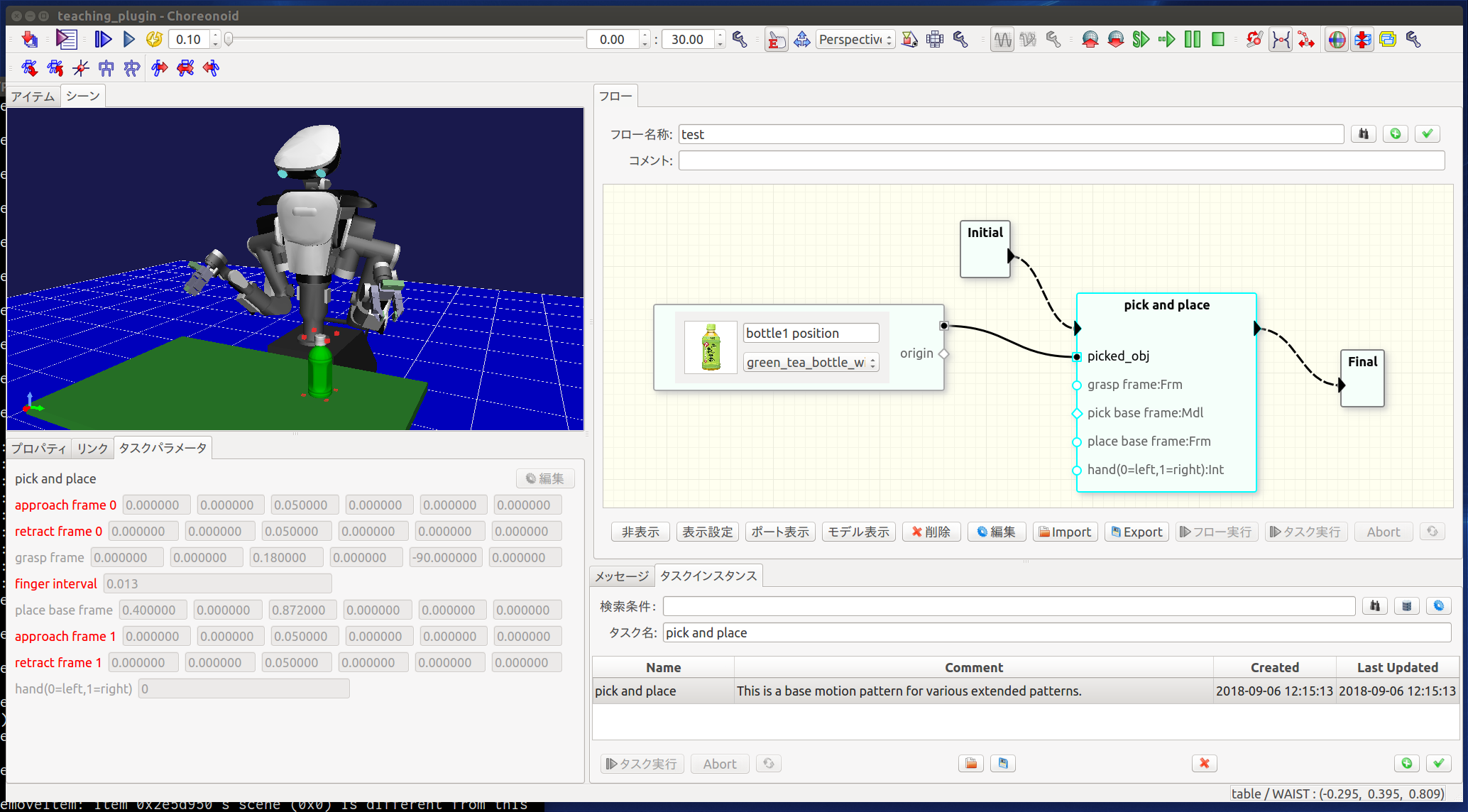
teachingPluginはロボットの教示ソフトウェアの一種です。あらかじめ設計されたロボットの動作パターンを組合わせることで、より長い作業手順を記述します。3Dモデルを動作パターンに紐付けることで、3Dモデルの位置や3Dモデル上に定義した座標系を利用して動作パターンを調整することができます。また、3Dモデルに加えて画像やテキスト等のデータも合わせて利用することで、ユーザが動作パターンの目的を理解し、再利用しやすい形でのデータ管理を可能とします。
本ソフトウェアは、産総研で開発されたロボット用統合GUIソフトウェアであるChoreonoidのプラグインとして動作します。
インストールと実行
動作環境
- Ubuntu18.04LTS
- Choreonoid 1.7.0
環境構築、サンプルデータの入手
# Choreonoidのダウンロードと依存パッケージのインストール wget https://choreonoid.org/_downloads/choreonoid-1.7.0.zip unzip choreonoid-1.7.0.zip cd choreonoid-1.7.0/ ./misc/script/install-requisites-ubuntu-18.04.sh mkdir -p build # teachingPluginとサンプルコントローラのダウンロード git clone https://github.com/ryhanai/teachingplugin ext/teachingPlugin git clone https://github.com/ryhanai/SampleTPControllerPlugin ext/SampleTPControllerPlugin ./ext/teachingPlugin/misc/script/install-requisites-ubuntu-18.04.sh # コンパイル cd build cmake .. -DBUILD_TEACHING_PLUGIN=ON -DBUILD_SAMPLE_HIROCONTROLLER=ON -DUSE_ROS=OFF # GUIを使いたい場合は # $ ccmake .. # BUILD_TEACHING_PLUGIN=ON, BUILD_SAMPLE_HIROCONTROLLER=ON, USE_ROS=OFFに設定します。 # 必要ないオプションを切っておくと、コンパイル時間を短くできます。 make -j8 # サンプルデータの取得 cd ../ext/teachingPlugin/share/project wget "https://drive.google.com/uc?export=download&id=119r3ddfe8cumd2JSz4dFfbiD3YWBMfKd" -O teachingDB.sqlite3
実行
choreonoid-1.7.0/build/bin/choreonoid teaching_plugin.cnoid # choreonoidのパスは必要に応じて補ってください。
Note
サンプルデータのダウンロードに失敗する場合は、ここから手動でダウンロードし、teachingDB.sqlite3という名前で保存してください。
ライセンス
本ソフトウェアはオープンソースソフトウェアとして開発されており、そのライセンスはMITライセンスとしております。